SBS 뉴스
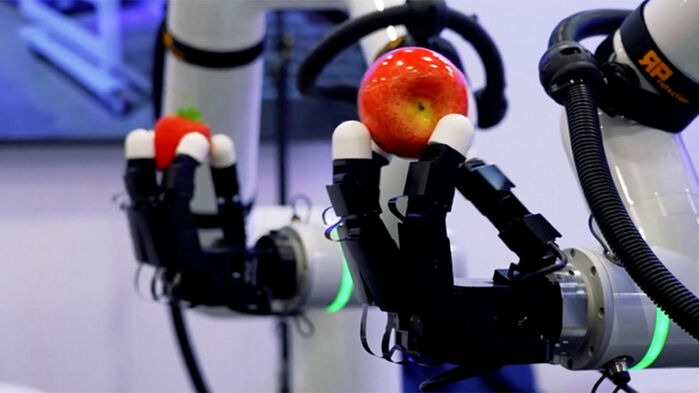
올해 CES에 사람을 닮은 휴머노이드를 선보인 업체들이 유독 강조해서 보여준 부위가 있었죠. 사과를 굴리고, 카드를 집고, 자동차 부품을 들어 올리고 모두 손을 이용한 동작들입니다. 로봇 회사들이 이 동작들을 보여주는 이유는 분명합니다. 로봇에서 가장 중요하지만 그만큼 어려운 분야가 바로 이 손이기 때문입니다. 작년에 열린 한 포럼에서 테슬라 CEO 일론 머스크도 휴머노이드 개발의 난관으로 AI 두뇌와 대량생산 그리고 '손'을 꼽을 정도였습니다 특히 테슬라가 생산하는 휴머노이드 옵티머스를 개발하는 데 있어서 핵심 문제는 전적으로 손이라고 콕 집어 말하기도 했습니다. 왜 손이 이렇게 어려운 걸까요?
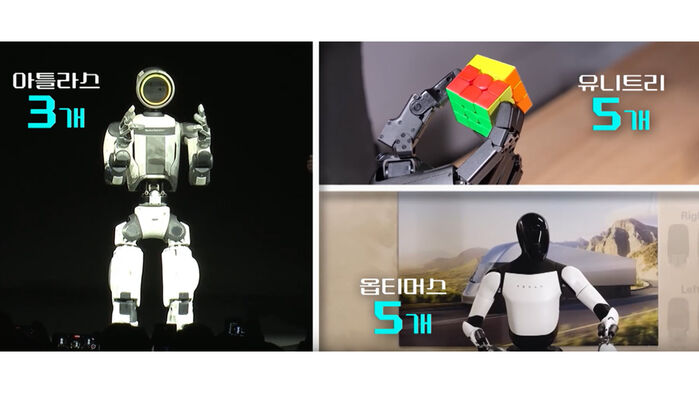
"3개든 5개든"…손가락 갯수는 상관없다?
배지훈 / 한양대 로봇공학과 교수
무게 중심이 바깥쪽에 있죠. 그래서 이렇게 해서 이렇게 중력 받아서 떨어집니다. 3차원 공간상에서 3차원 물체를 내가 원하는 방향으로 잡고 있으려면 3개가 필요한 거예요. 손가락 3개 4개까지만 있으면 지금 하고 있는, 일상생활에서 하고 있는 것들은 다 할 수 있습니다.
사실 로봇업체가 손가락 개수를 정할 때는요. 심미성도 중요한 요소입니다. 사람 손과 닮을수록 시연 영상에서 이해하기 쉽고 투자자와 고객의 시선을 끌 수 있기 때문입니다.
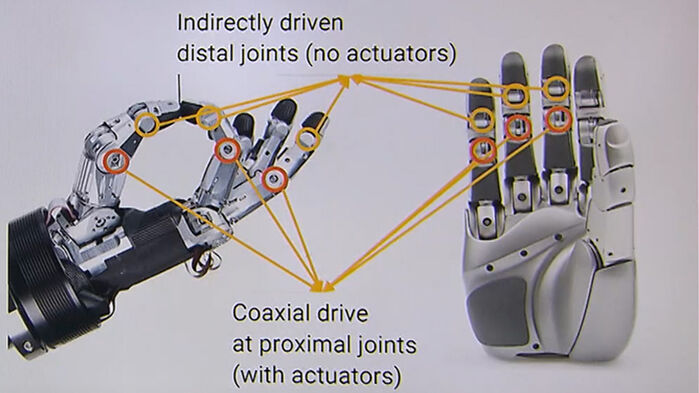
핵심 부품은 '액추에이터'?

그런데 이 조건들을 동시에 만족하기는 당연히 어렵습니다. 이런 고민 끝에 로봇 회사들은 손에 들어가는 액추에이터를 두 가지 방식으로 나눠 접근하고 있습니다. 우선 손가락이 꺾이는 이 관절 자리마다 액추에이터를 넣는 방식, 이른바 다이렉트-드리븐이라 불리는 방식입니다. 제가 취재를 했던 국내 휴머노이드 업체 로보티즈가 이 방식을 사용합니다. 보스턴다이내믹스 아틀라스도 자세히 살펴보면 이 방식으로 보입니다. 각 관절에 장착된 액추에이터가 각각 움직이기 때문에 더 다양한 동작을 할 수 있어 자유도가 높고 동작이 빠르고 정확합니다. 또 고장 난 액추에이터만 갈아 끼우면 되니까 산업 현장처럼 하루 종일 반복 작업을 해야 하는 환경에선 내구성과 신뢰성이 가장 큰 강점입니다. 하지만 단점도 있습니다. 손가락 마디마다 모터와 기어, 제어장치가 들어가다 보니 손이 두꺼워지고 무게가 늘고 가격도 올라갈 수 있습니다. 로봇 손을 만드는 또 다른 방식은 손가락 끝마디를 와이어로 당기는 방식, 이른바 텐던-드리븐 방식이 있습니다. 액추에이터를 손바닥이나 손목에만 장착하거나 관절 일부에만 장착하기 때문에 액추에이터를 덜 쓰고 비용도 줄어듭니다. 모양은 사람 손에 가까운데 테슬라 옵티머스나 중국 유니트리의 손가락이 사람처럼 얇고 가는 이유가 액추에이터를 마디마디마다 다 넣지 않았기 때문입니다. 구조가 단순하고 가볍지만 다만 와이어의 장력, 텐션이 떨어져 늘어나면 정밀도가 떨어지고 유지보수를 자주 해줘야 한다는 번거로움이 있습니다.
"로봇 손은 진짜 전쟁"

배지훈 / 한양대 로봇공학과 교수
갑자기 작년에 중국에서 했던 로봇 학회랑 거기에 로봇 손을 만들어서 파는 회사가 10개가 갑자기 생겼어요. 1년 몇 개월 만에 그러니까 몇 개월 만에 중국에서만 10개 나오고요. 국내에도 비슷비슷한 유형의 회사들이 한 5개 정도 회사들이 손만 하겠다고 하는 회사들이 하도. 로봇 손은 진짜 전쟁이에요 진짜.
2026년 올해 AI가 하드웨어에 탑재되는 피지컬 AI가 본격화될 거라 하죠. 휴머노이드의 승부처는 어쩌면 손에서 갈릴지도 모릅니다.
 동영상
동영상Copyright Ⓒ SBS. All rights reserved. 무단 전재, 재배포 및 AI학습 이용 금지
SBS 뉴스